
Efficiency optimization of fleets and electric vehicle routes
This scenario will focus on the validation of real-time planned routes for automated vehicles, based on the data received from the infrastructure, the vehicle's own perception and its characteristics and conditions (dimensions, autonomy, battery status). The efficiency of the complete vehicle travel, from destination identification to parking in a public environment, will be evaluated. The demonstrator will validate the improvement of current parking systems, both temporary and long-stay, reducing travel times and emissions derived from the search for free spaces. In addition, it will allow a new design of parking spaces, where their size can be reduced while maintaining the same capacity.
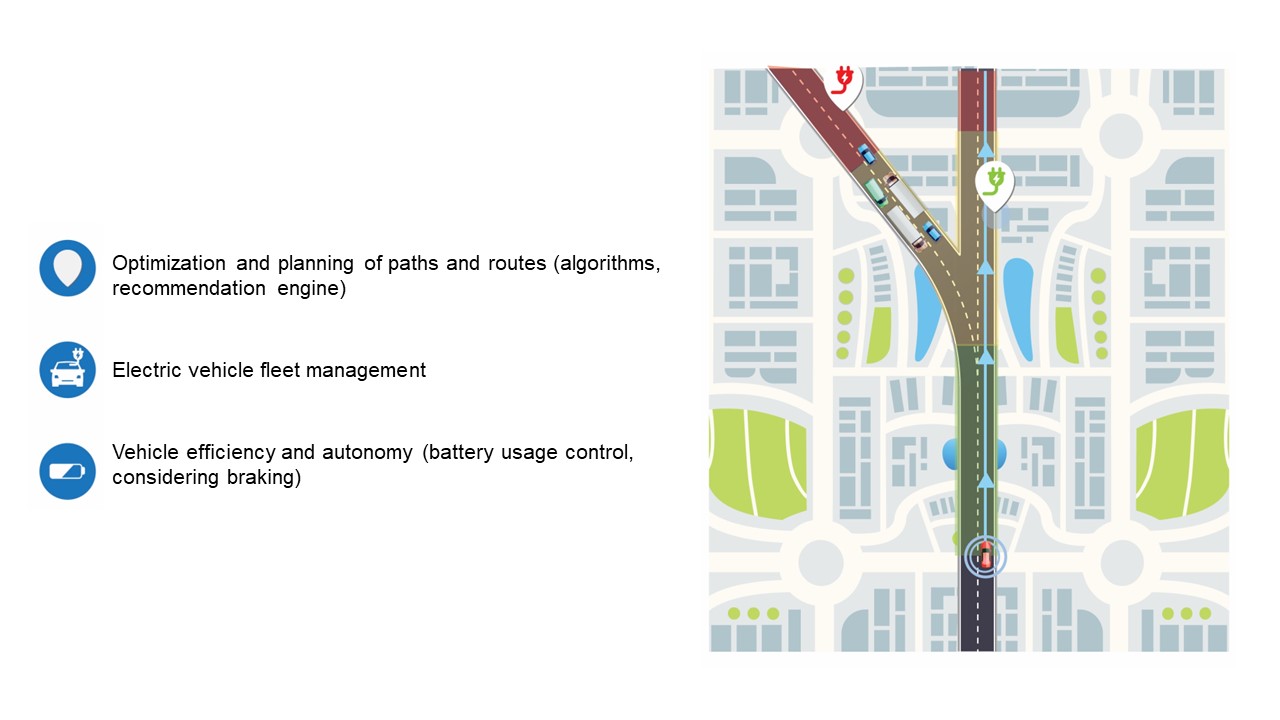
The objective is the development of a system that contributes to intelligent route planning, allowing to plan the stop at the various recharging points during the journey, taking as a reference the available battery of the electric vehicle, the travel distance, the characteristics of the road, the weather, and the need for a fast or full charge. All this information will be taken as a basis for establishing the most efficient and sustainable route in real time, being updated if the environmental conditions vary and applying the vehicle's acceleration and braking control for optimal use of the electric battery.