
Monitoring of CAVs behaviour
Autonomous vehicles can make decisions that compromise the safety of the road they are driving on due to different reasons. For example, a sensor calibration, an electronic failure, a hack or cyber-attack, or a mismeasurement due to adverse environmental conditions. This scenario aims to provide road managers with tools to detect these misbehaviors, so that they can act before an incident occurs.
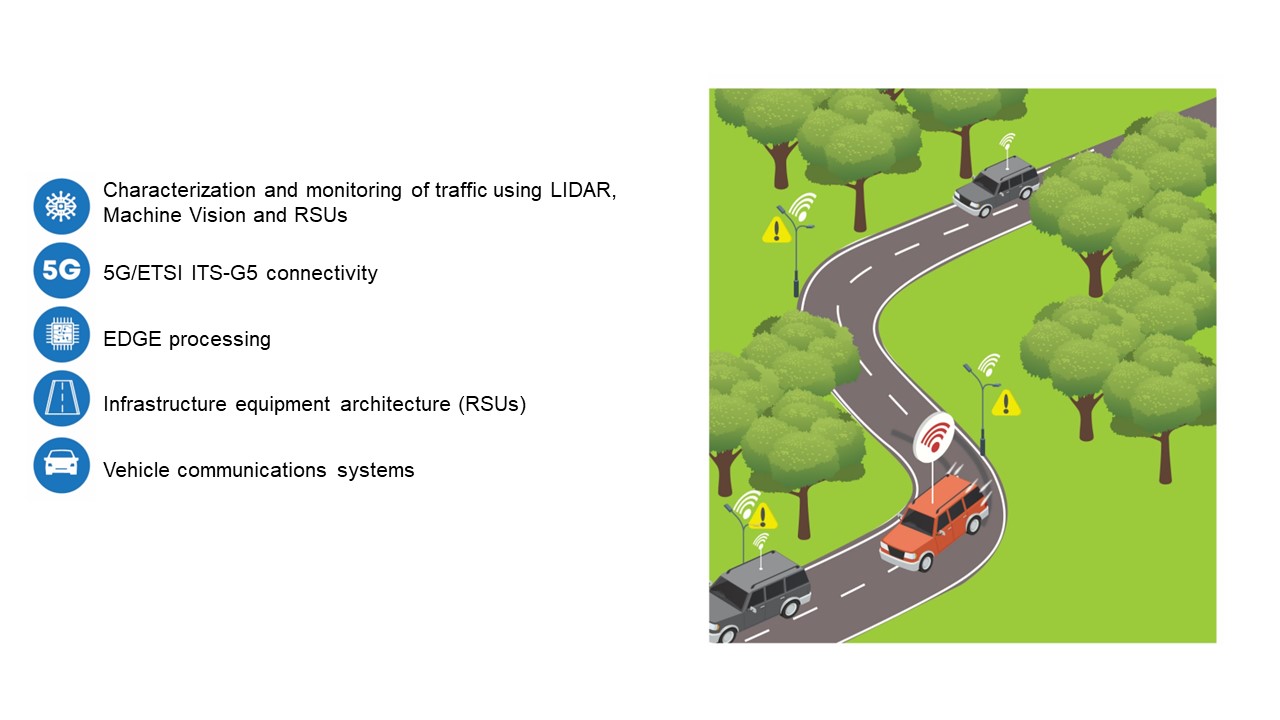
On the one hand, this scenario will validate the accuracy of some of the sensorization technologies developed in the project (V2X, LIDAR, etc.) to identify, characterize and track vehicles on a road, so that a "map" representing the road situation in real time can be obtained. On the other hand, the algorithm developed to detect a potential anomalous behavior performed by a CAV, through the information collected from the sensors deployed in the infrastructure, will be validated.
While CAVs currently have driving supervision systems that warn of dangers due to collisions, speeding, etc., there is no automatic system independent of the vehicle that can detect potential dangers and predict incidents from the infrastructure. This monitoring system will need to be scalable due to increased needs as higher levels of automation and mixed traffic conditions are introduced.